

ECO400
通用控制器
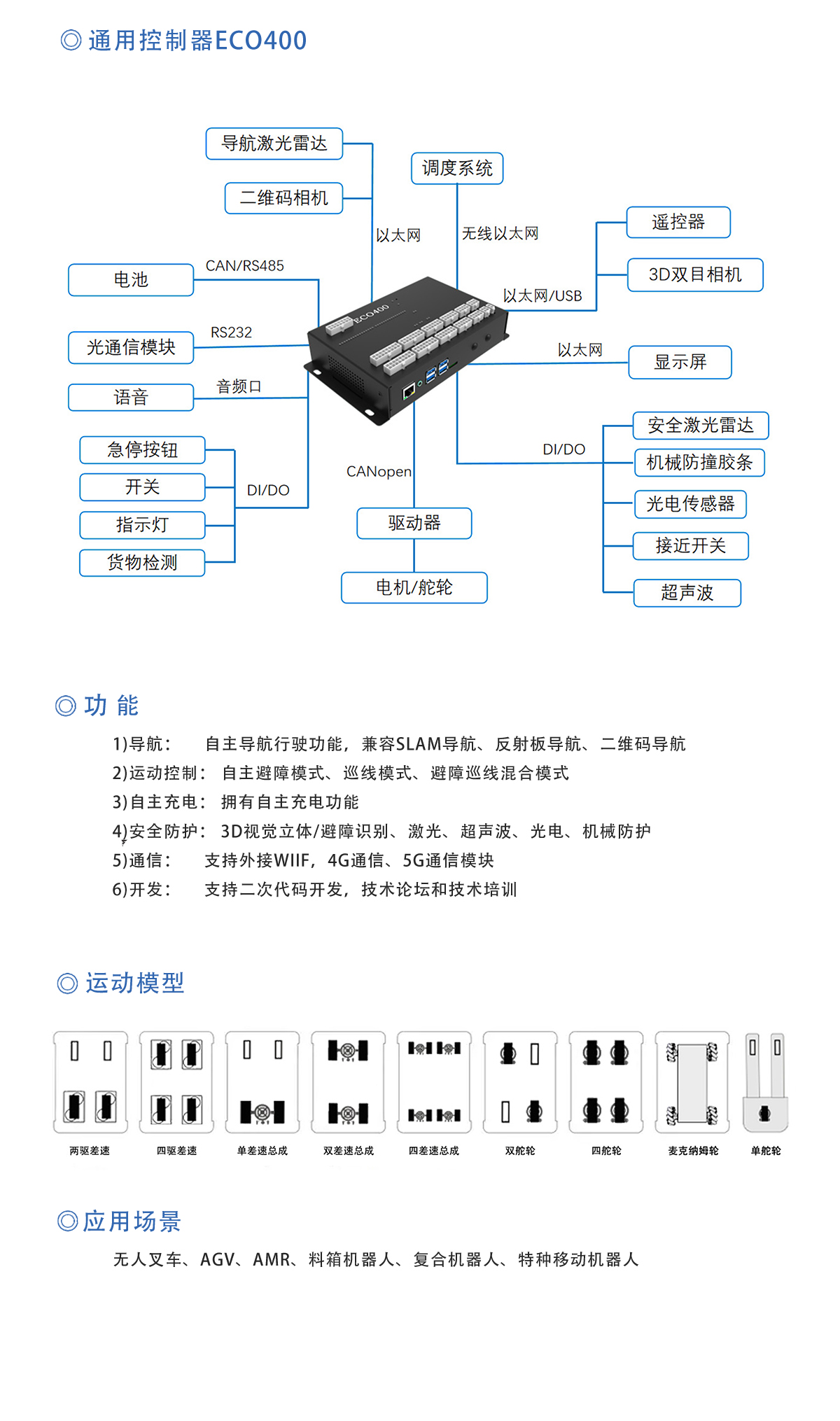
自主研发的运动控制器,适用于多种类型的移动机器人产品。该运动控制器采用工业级芯片,兼容多种通信协议,包括CAN总线、TCP/IP网络协议;外接口丰富,可接多种传感器(激光导航雷达、导航相机、防撞激光头、超声波、直流/伺服电机驱动器、舵轮等);外接设备采用线束设计,使机器人布线整洁美观,组装简单,容易维护。
| 功能项目 | 参数 |
| 型号 | ECO400 |
| 长*宽*高 | 220*132*50mm |
| 电源 | |
| 输入电压 | 18~28V / Vpp<200m (有反接保护) |
| 电流功耗 | 单机<0.4A/24V,含外设最大电流<3A(24V) |
| 通信接口 | |
| 以太网 | 1000M RJ45 *1 |
| USB3.0 | * 4 |
| CAN | * 2 |
| RS485 | * 2 |
| RS232 | * 2 |
| 输入输出接口 | |
| 输入 | 5V~24V光耦隔离输入 *16 |
| 输出 | 2A / NMOS隔离 输出 * 16 |
| 模拟输入 | |
| ADC输入 | * 4 |
| 模拟输出 | |
| 差分输出 | * 4 |
| 编码输入 | |
| 正交编码输入 | * 4 |
| 音频接口 | |
| 语音播报 | 支持(3.5mm音频接口) |
| 指示灯接口 | |
| 工作指示灯 | 运行状态灯、通信灯 |
| 功能参数 | |
| 定位精度 | ±5mm(反射板导航),±10mm(SLAM自然导航) |
| 导航速度 | ≤1.5m/s |
| 角度控制精度 | ±0.5° |
| 运动控制 | 自主避障行驶、固定路线行驶、避障固定路线混合行驶 |
| 地图面积(单张地图) | ≤400000㎡(支持多地图导航) |
| 运动模型 | |
| 差速运动模型 | 两驱差速、四驱差速 |
| 舵轮运动模型 | 单舵轮、双舵轮、三舵轮、四舵轮 |
| 其他运动模型 | 差速总成、麦克纳姆轮、其他定制化底盘 |
| 其他功能 | |
| 调度系统 | 选配 |
| 配套的设计软件 | 支持 |
| 配套的应用软件 | 支持 |
| 自动充电 | 支持 |
| 外接触摸屏 | 支持 |
| 栈板识别 | 支持 |
| 视觉定位 | 支持 |
| 料腿识别 | 支持 |
| 随动功能 | 支持 |
| 标志物二次定位 | 支持 |
| 导航激光辅助避障 | 支持 |
| 3D视觉避障 | 支持 |
| 功能逻辑二次开发 | 支持 |


 公安备案号44030702004838
公安备案号44030702004838