移动机器人,是智能机器人领域发展的重要分支。在移动能力发展初期,满足了工业和物流领域大量且繁重的物料搬运和周转的需求,以AMR、无人叉车为代表的新一代移动机器人开始登上舞台,并开始在物流、商业服务等更多场景中实现落地应用。但是目前移动机器人领域依然面临着核心问题的困扰,以研发为中心的易行机器人选择攻克难题为移动机器人扩大领域,在通用控制器系列产品里ECO400与精简款ECS100解决了移动机器人产品的5大核心问题。
导航问题
作为移动机器人最基础也是最重要的一个功能——自主导航,它是体现移动机器人自动化、智能化的关键一环,同时它也是机器人具有完成移动作业的基本性能。当机器人处于未知复杂环境中,经过自身携带的传感器对周围环境感知,获取环境数据进行处理以达到预期目的。在这种情况下,易行机器人兼容的多种自主导航功能,如激光SLAM导航、反射板导航、二维码导航、导航定位等导航方式,使得移动机器人在行走过程中不会迷失方向,优化路线避免与其他障碍物相碰撞,最后顺利到达指定地点完成工作任务。

(无人叉车AGV工作)
运动控制问题
移动机器人运动系统的可控性、协调性程度将直接影响机器人整体的功能,在许多领域也都引入了移动机器人来协助人类来完成一些高危、繁琐、超重的工作。在不同的领域,搭配不同的底盘,易行机器人在底盘兼容能力方面,完全满足AGV/AMR各种非标定制场景,可大幅缩短部署时间;在模式上,易行可支持自主避障模式、巡线模式、避障巡线混合模式、双舵轮模式、差速运动模型等多种运动模型,来更好的发挥机器人智能化、柔性化的优势。

(无人叉车AGV自主充电)
自主充电问题
使用移动机器人时,可以持续长时间运行,在没有运行任务时,也可以自行充电,确保工作流程,增加效率,从而降低人工成本。
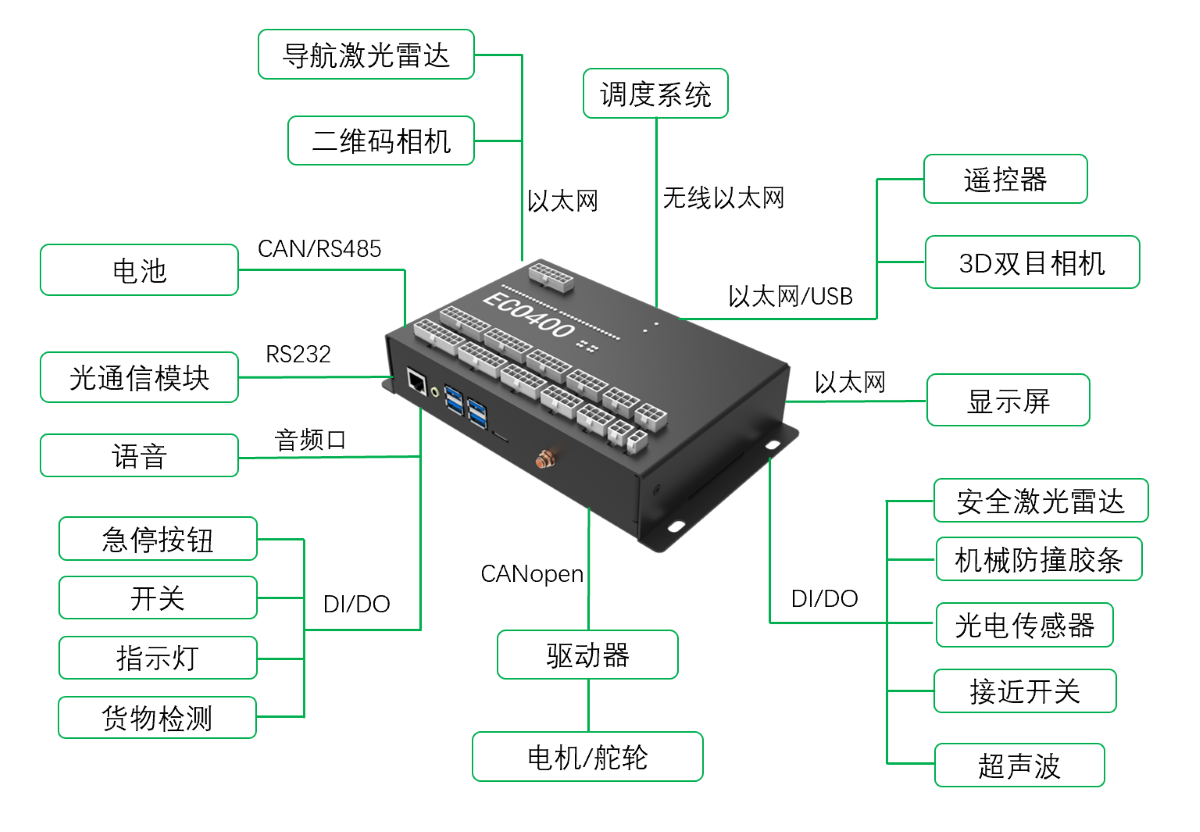
(ECO400系列控制器)
安全防护问题
移动机器人安全防撞技术有很多种,大致分为非接触式和接触式防撞技术,易行机器人掌握多种防撞技术,以3D视觉立体安全防护/避障识别、激光避障、超声波、光电、机械防撞等多种安全防撞技术,通过传感器探测障碍物与机器人的距离来提前感知预防相撞;在不同环境下易行机器人设计不同需求的避障方案,更好的适应工作环境,以达到安全可靠的运行。
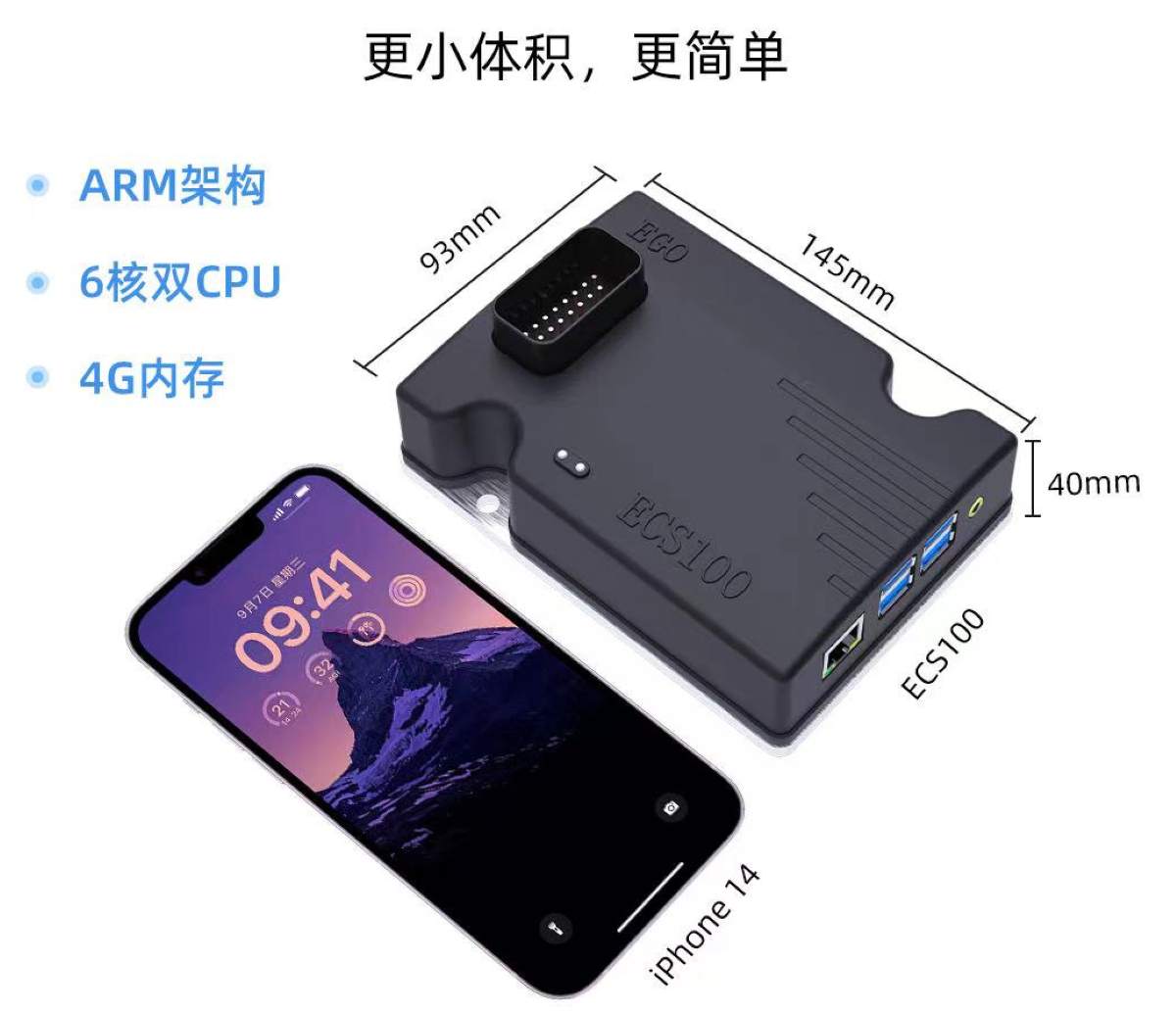
(ECS100系列控制器)
通信问题
在移动机器人的通信方面,易行机器人支持外接WIFI,4G通信、5G通信模块。
针对以上移动机器人产品的5大问题,易行机器人以技术为根本、需求为向导,自主研发通用控制器系列ECO400与精简款ECS100,支持二次开发,降低成本,为行业解决痛点推动移动机器人的落地应用。


 公安备案号44030702004838
公安备案号44030702004838